Coprocessor¶
Warning
Support for libyggdrasil on the Coprocessor is currently experimental and might still contain some issues.
Note
The CubeIDE v1.6.1 currently has an issue that prevents the MP1 from getting correctly reset after flashing a program. This causes the M4 to jump into the error handler during clock initialization in the engineering boot mode. To work around this issue, manually reset everything using the Reset button on Yggdrasil.
Setup¶
To start developing on the Yggdrasil platform using Asgard’s Coprocessor, the following things are needed:
See also
After starting the IDE for the first time, close the welcome screen and click on File -> Import....
Then import the Midgard Template using the Existing Project into Workspace option.

For starting with embedded C development, simply open Core/main.c, scroll down to find the main function and in there scroll further down until you find a block
of code that looks like this:
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
All code goes between one of the /* USER CODE BEGIN XXX*/ and /*USER CODE END XXX*/ blocks. This is important since everything outside of these blocks
will be deleted when the project is regenerated with the .ioc file.
For starting with embedded C++ development, a few more things are needed.
First, create a new file called e.g cpp_main.cpp in the Core/Src folder. In there, include <yggdrasil.h> and create a new function like this:
#include <yggdrasil.h>
C_LINKAGE void cpp_main() {
}
Then in main.c again, add a function prototype to the top of the file:
void cpp_main(void);
Now call this function above the infinite loop in main and add all your C++ code to the cpp_main function.
Testing¶
Engineering mode¶
It’s possible to test Coprocessor applications by switching the controller into Engineering boot mode using the boot mode switches. After that, it can be programmed similar to Midgard using the STM32CubeIDE.
Note
In contrast to Midgard, the coprocessor firmware resides exclusively in RAM. This means resetting the core through the IDE will erase the program and it needs to be reflashed before testing again.
Linux¶
To load the coprocessor firmware while Linux is running, the firmware’s .elf file can be placed in /lib/firmware on Asgard’s rootfs.
Afterwards the firmware can be loaded through sysfs using the following commands:
$ cd /sys/class/remoteproc/remoteproc0
$ echo "stop" > state
$ echo "firmware.elf" > firmware
$ echo "start" > state
This is mainly useful when using Asynchronous Multiprocessing or when releasing a final version of the product.
Troubleshooting¶
Peripherals don’t work at all¶
Code generated by the CubeIDE often fails to properly enable clocks for some peripherals. This is due to it thinking Linux on the A7 core is enabling them which isn’t running
in engineering boot mode. It’s easy to see which clocks aren’t enabled by checking the SFRs debug tab in the CubeIDE for peripheral registers it can’t read.
OpenAMP crashes in engineering boot mode¶
When using OpenAMP for Asynchronous Multiprocessing its initialization needs to be disabled in Engineering boot mode. Otherwise the M4 will run into a hardfault.
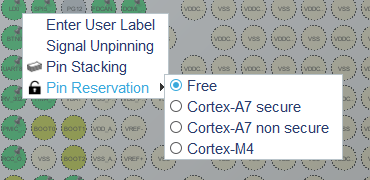
GPIO Pin initializations aren’t generated by CubeMX¶
Since Asgard pin definitions may be used in one of multiple different environments, the CubeIDE needs to know where to generate the pin initializations.
For this, set a pin to a GPIO Input or Output, then right click it, select Pin Reservation and then the environment the pin is used in. For the Coprocessor, select Cortex-M4